



Gateway transmission of CAN and LIN communication is possible. By using DMA and interrupt function without using RTOS, realized high-speed processing.
[ Supported protocol ]
CAN,LIN.RS232C,Ethernet,USB2.0,DIO,A/D IN.SINK OUT.SRC OUT and more…
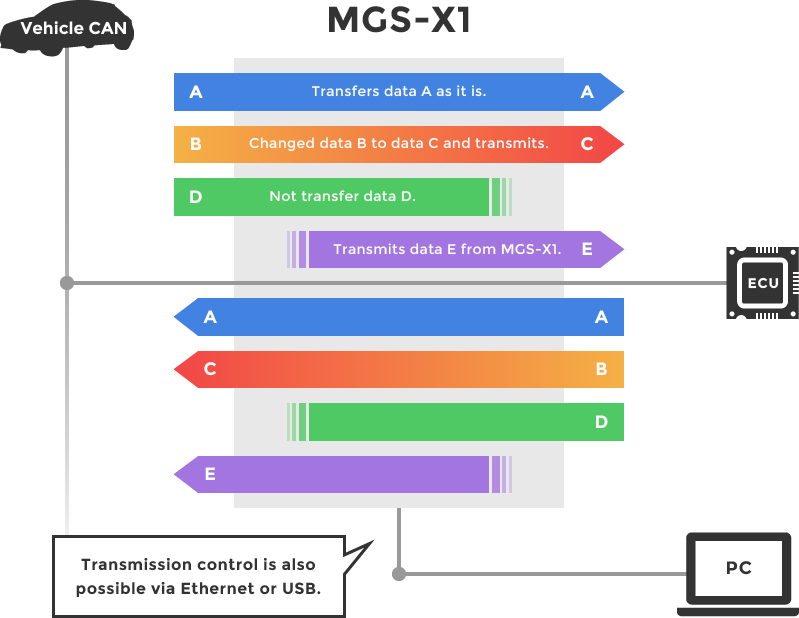
150mm (width) × 35mm (height) × 110mm (depth) and compact and equipped with various interfaces. Since RTOS is not used, a high-speed operation with low consumption is realized. Shutdown is unnecessary, and startup time is 1 second or less. Input voltage is 12 V (operated from 5.5 to 27 V) / Consumption current is 110 mA. This is possible to change only the necessary information while transferring all CAN and LIN data on the bus. IoT review environment using ethernet is provided.
| Interface | Number of channels |
|---|---|
| CAN | 4ch |
| LIN | 6ch(2 channels of them are shared with RS232C.) |
| RS232C | 2ch(shared with LIN) |
| Ethernet | 1ch |
| USB2.0 | 1ch Host / 1ch Device funtion |
| Digital input/output | 10ch |
| Analog / Digital input | 8ch(For analog input, 10bit ADC) |
| Sink digital output | 8ch |
| Source digital output | 4ch |
| EEPROM | 2 pieces(1Mbit per piece)、I2C interface |
CAN/CAN, CAN/LIN and other vehicle information can be transmitted to Ethernet and USB etc. By using the API library, gateway processing between the same or different protocols is possible. (Supported protocol: CAN / LIN / USB )
By constructing a web server (HTTP protocol) in MGS-X1, it is possible to monitor and control the hardware from the browser. The server application writes to flash-ROM and uses it. By using a wireless LAN router, it is possible to monitor and control with tablets or smartphones etc.

Equipped with CAN communication function of 4 channels.(communication speed: 125kbps / 250kbps / 500kbps / 1Mbps) For each channel, it is possible to process frames with transmission = 32 IDs / reception = 26 IDs at the maximum. (Also supports the extended frame. * It is possible to increase the number of IDs by customizing). By using API library, it is possible to send three types of frames: 1) periodic transmission, 2) event transmission, 3) event + periodic transmission. Tedious timing control in applications is unnecessary, and the efficient development is possible. Frame reception can be selected in two ways: 1) receive all frames, 2) receive only when the value is changed from the last received data.
Equipped with LIN communication function of maximum 6 channels.(communication speed: 2400bps / 4800bps / 5200bps / 9600 bps / 10.4kbps / 19.2kbps) By using API library, it is possible response transmission. Schedule datas can register up to 254 patterns per channel. Response processing of 32 IDs each transmission / reception is possible. Support for LIN 1.3 / LIN 2.1.
Data can be shared between CPUs by high-speed UART communication of 20 Mbps. The checksum method is adopted for error detection.
One EEPROM are mounted on each of the main / sub CPU.(Accessing method are used DMA and the interrupt processing.) By using API library, troublesome I2C control in applications is unnecessary, and an efficient development is possible.
Equipped with RS232C communication function of 2 channels.(communication speed: maximum 230.4 kbps * Up to maximum 500 kbps is possible by customizing )
Equipped with 16bit LED outputs and 8bit Switch inputs.
The API for efficiently developing applications is prepared. By using the API, it is possible to let the cumbersome control of PIC32MX hardware be handled within the library. Reducing processing time with using DMA and interrupt processing.




